arrow_back Back home
12 April 2022URSA selected presentation: Map-Assisted State Estimation for Autonomous Driving
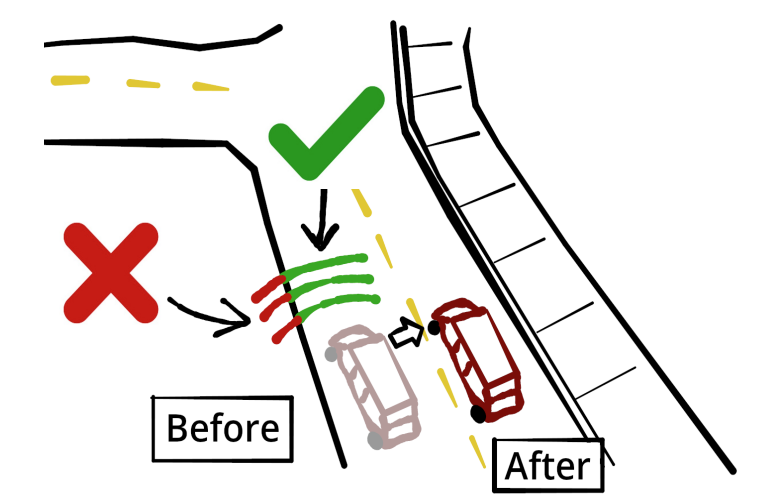
Above: My proposed method, where faulty GNSS estimates are “nudged” using semantic segmentation and map data.
As part of the applied autonomous driving group that I lead, I’ve been working to develop a stable and accurate state estimation program for us to use on our test vehicle. This is easier said than done: It seems like every approach (and there are many) has a tradeoff. ICP is easy to understand and implement, but it’s prone to destabilizing in monotonous environments. Factor graphs are cutting-edge and accurate, but they’re computationally expensive to optimize in real time. Monte Carlo localization is more stable than ICP and its derivatives, but it takes time to converge, and it’s prone to something called the Kidnapped Robot Problem. You get the idea– no perfect solution to robot localization exists.
As one solution, I established the concept of “nudging,” where a highly noisy GNSS (GPS) position is gradually corrected using camera data and a stored map. This is done with the combination of a semantic segmentation network, a bias estimator that uses the segmented road pixels and map data, and an unscented Kalman filter (UKF). These three components form a state estimator that reduced GPS error by 47%, despite high simulated sensor noise.
My work on state estimation, which is part of a broader team effort in autonomous driving, was selected from a pool of proposals to be a part of the 2022 Undergraduate Research Scholarship (URSA) program at UT Dallas. You can view my full poster here.
Above: Presenting my work to a member of the public