Projects
Here are examples of some things that I’ve worked on, big and small!
Force-feedback teleop device for bimanual manipulation
With a mechanical engineering colleague, I developed a force-aware teleop device with support for null-space regulation, electronic friction compensation, intervention detection for RL training pipelines, and more. The entire control loop, including the inverse dynamics, is optimized to run quickly. We're in the process of open-sourcing the software and hardware. Stay tuned!
A self-driving car that drove us to the park
I founded and led an autonomous driving group called Nova! We built our own self-driving car (custom software and hardware setup). Here’s our car taking us on a picnic.
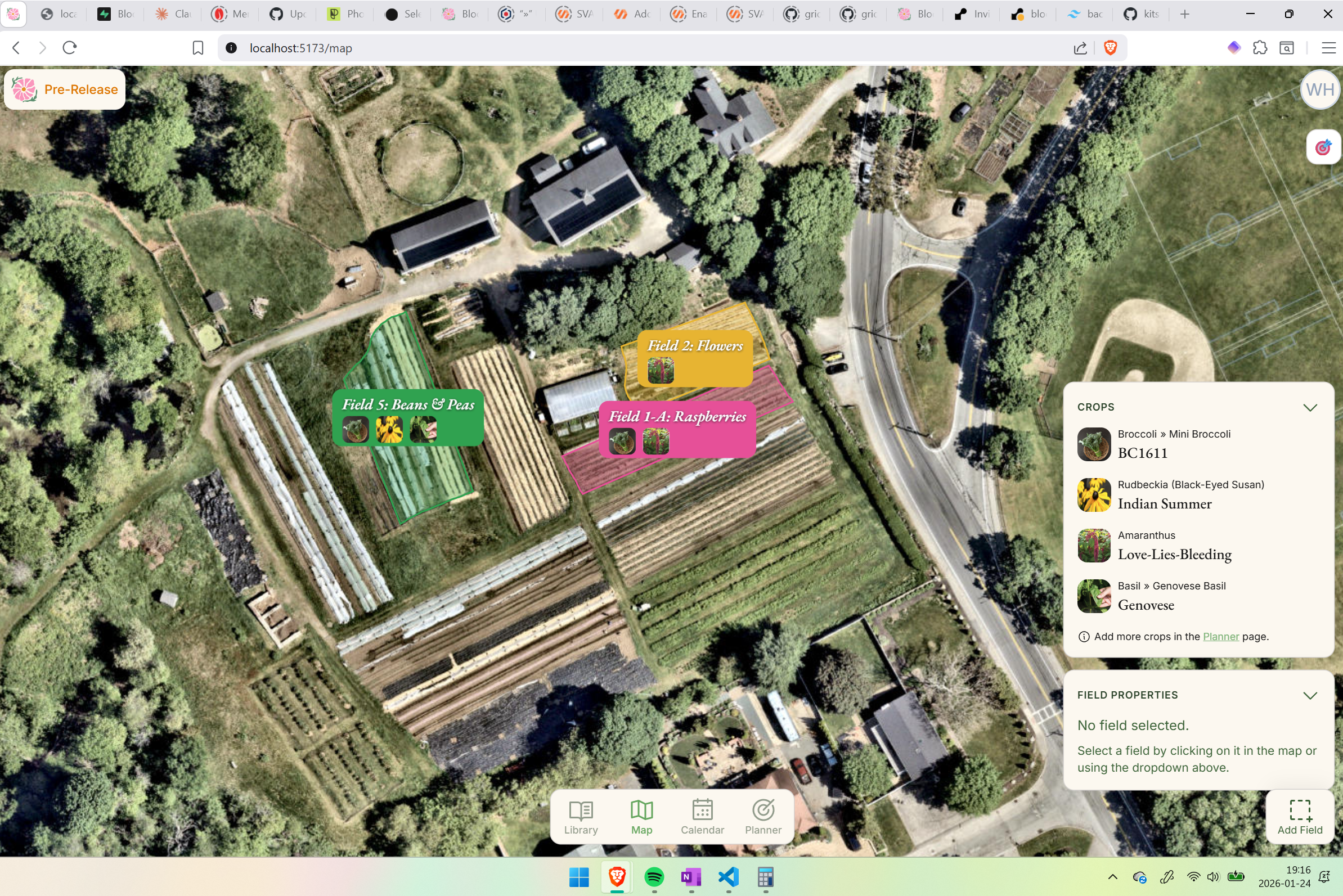
Bloomcast, an AI-driven crop planning tool
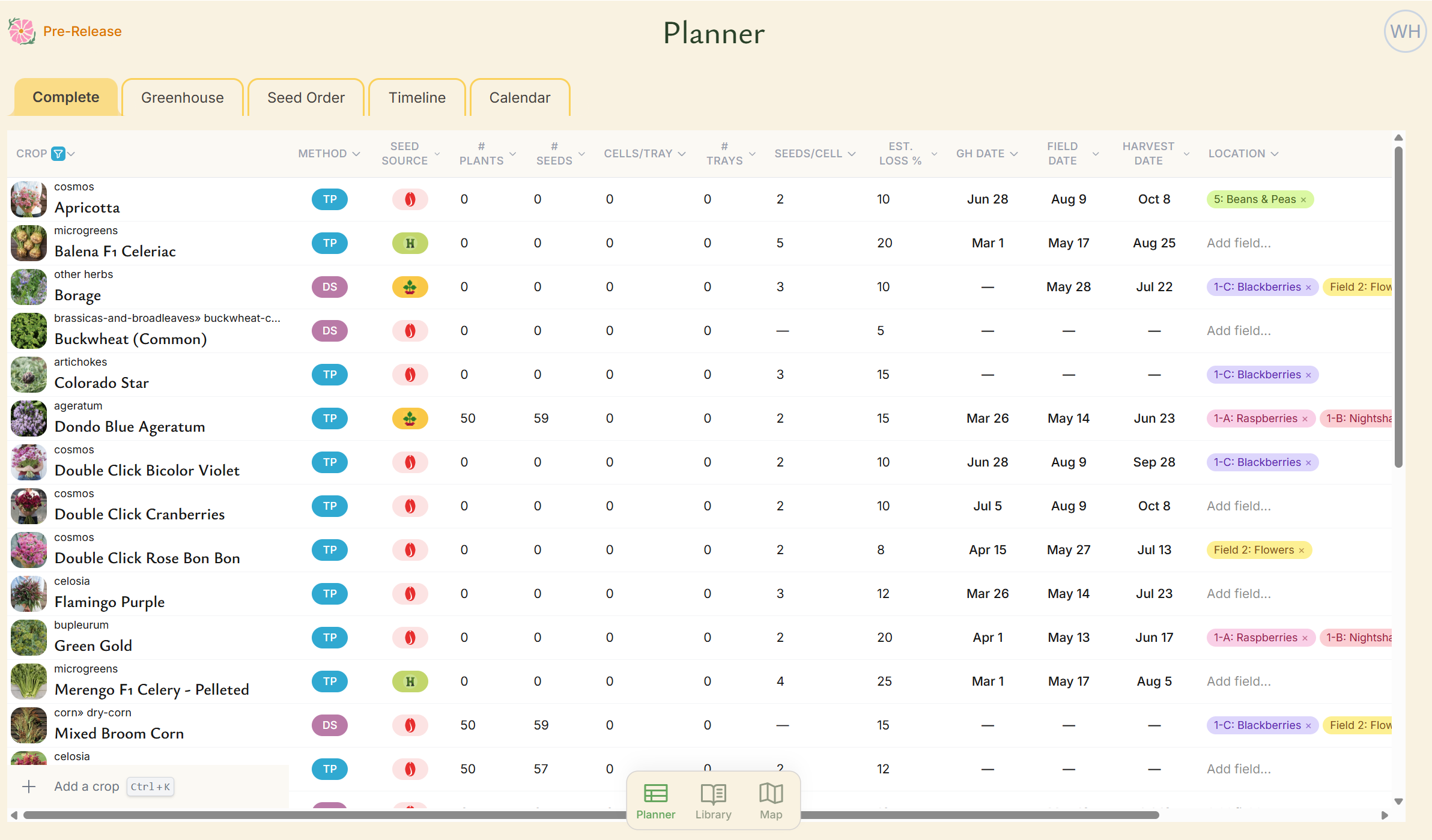
The Planner is a smarter alternative to spreadsheets. It features sortable, searchable columns, validation, pre-built formulas, and autofill backed by a powerful crop model. Most data, including ideal dates, is suggested automatically by the software.
Bloomcast is a full-stack, AI-driven crop planning tool for sustainable farmers. At its core, it's a data pipeline problem: I maintain a detailed crop parameter library and growth modeling system that ingests climate data, soil conditions, and farm-specific preferences, then transforms that complexity into a simple, actionable plan— a complete calendar, seed order sheet, and field map, generated automatically. The interface has to make hundreds of interconnected variables feel simple and even fun to navigate. Built with Svelte, Supabase, Resend, Flask, the Anthropic API, and PostHog. Currently in early pilots with farmers in the Boston area.
Johnny, an autonomous reforestation robot
🏆 Winner of the Farm Robotics Challenge's Excellence in Regenerative Agriculture award, 2025
I wrote the software for Johnny, the second reforestation robot developed in the Kantor Lab at CMU. Like Steward (see below), Johnny was deployed in the real world. This time it planted real seedlings with the help of a robot arm. This was CMU's submission to the international 2025 Farm Robotics Challenge, where it won the
Pick and place in a custom simulator
Modeled joint dynamics of xArm 6 in EcoSim, my custom Unity-based robotics simulator. Wrote ROS2 package to calculate IK, plan trajectories, and send joint commands to Unity via TCP.
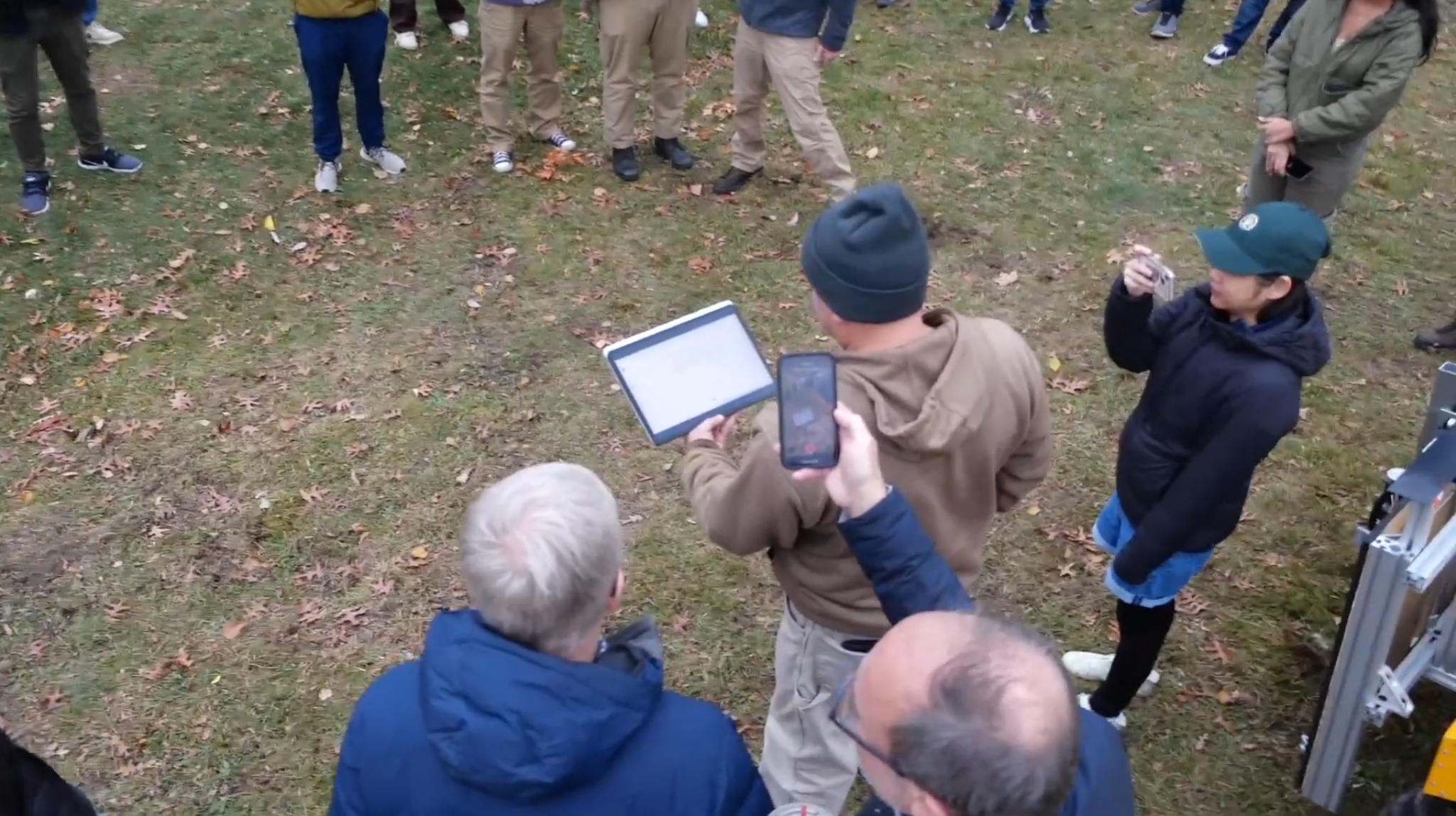
A fully autonomous reforestation robot for the real world
I managed a 5-person project to design and build a robot that plants trees in deforested areas. We used a Warthog UGV & a custom planting mechanism. I wrote the software, including a full ROS2 stack, custom simulator, a sleek web interface, and assorted firmware.
AlphaForest: RL-based forest design for optimal carbon sequestration
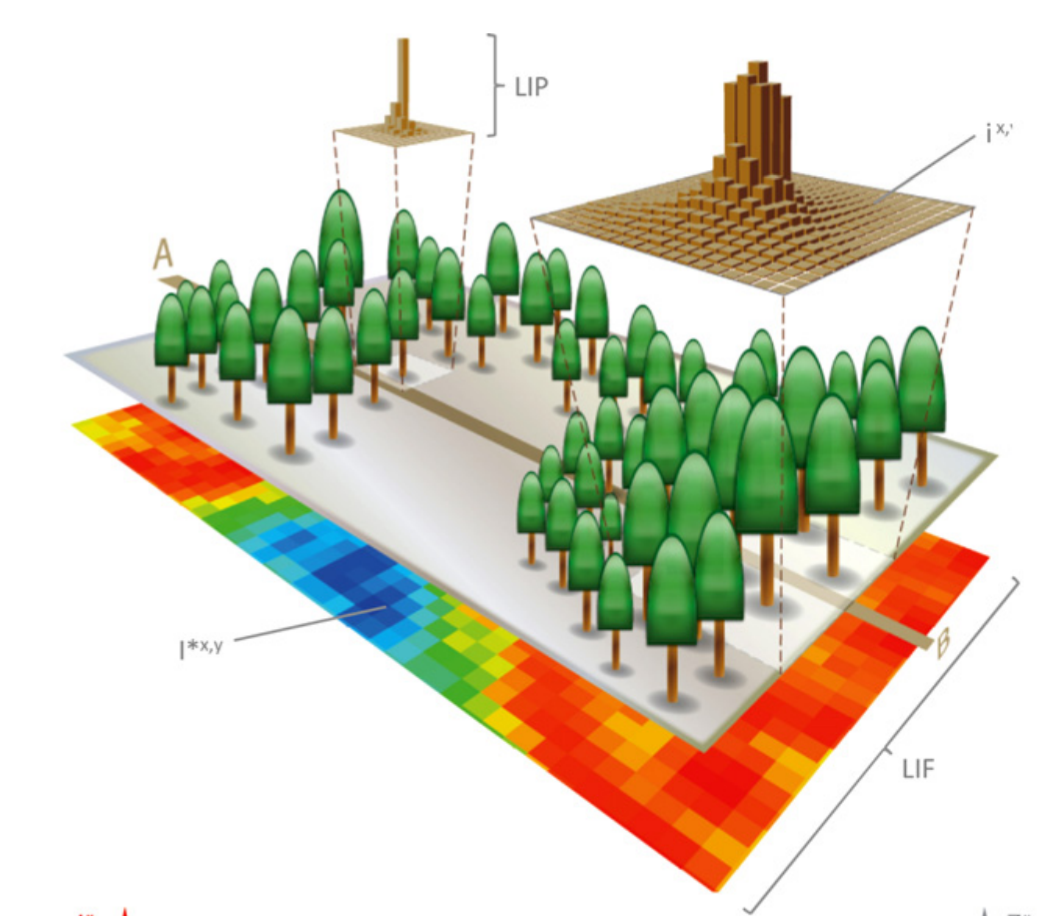
The simulator, based on the iLand forest growth model, simulates 100 years of growth in about half a second.
This was a project I developed for a class at CMU. I took a state-of-the-art forest growth model called iLand, re-wrote it in pure Python, made it way faster, and turned it into a Gymnasium environment. I then trained a reinforcement learning policy using PPO from Stable Baselines3 to optimize for carbon sequestration. I ran out of time to really polish it, but the results were very promising!
A forest design and robot control tool for the browser
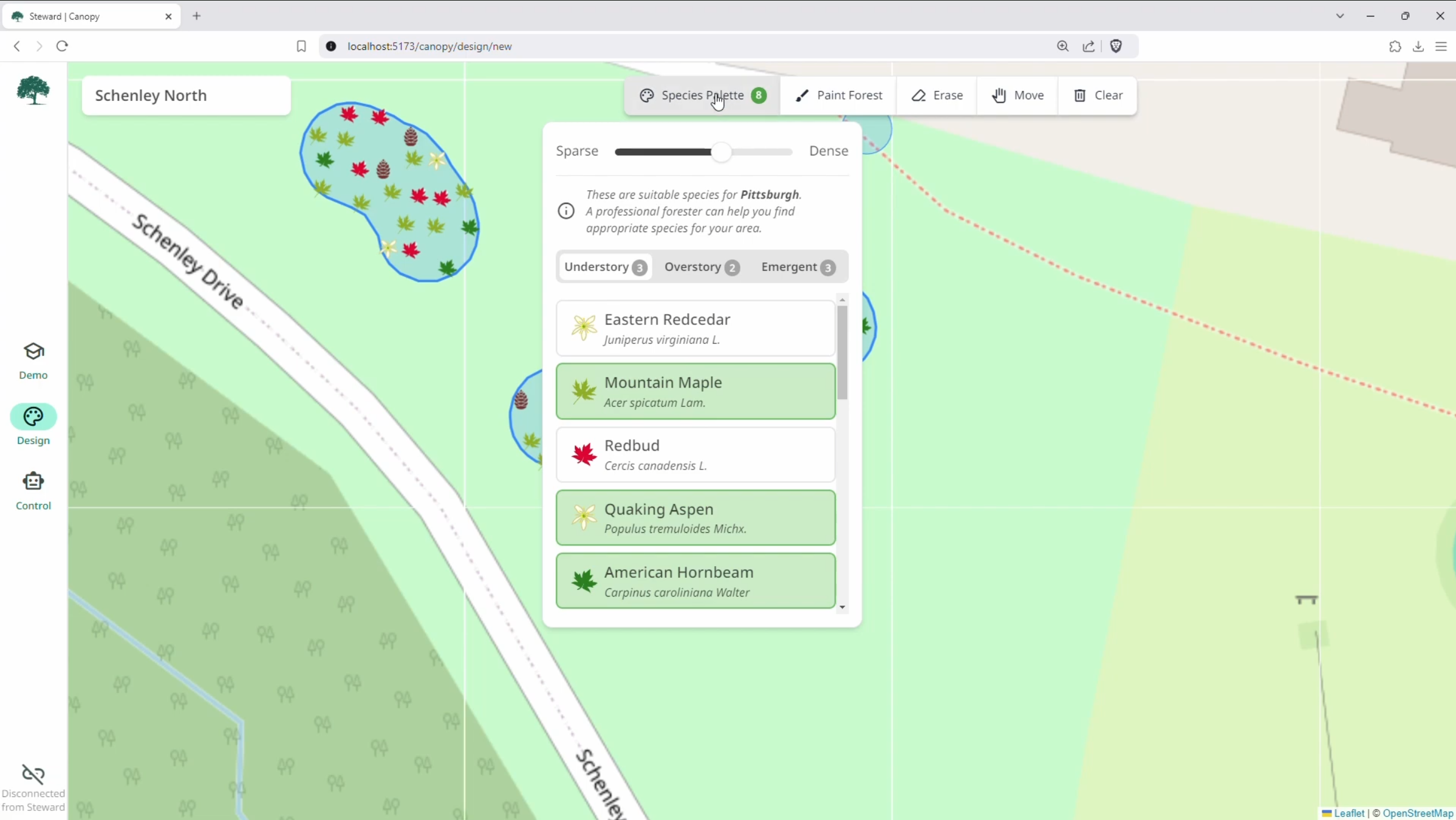

Canopy is a full-stack forest planner. Users select the trees they'd like to plant-- guided by climate-appropriate recommendations-- and simply paint them onto the map. The precise species mix and distribution is determined by an RL policy that I developed in the backend and trained on a forest growth model, with near-instant inference times. Planning a forest is as simple as finger painting.
Canopy can instantly generate forest plans using native species-- simply paint where you want your trees to go. It also communicates with a reforestation robot running ROS2 using websockets. Written with three.js, Svelte, SvelteKit, TypeScript, and bits-ui. It includes an interactive demo that guides new users through the forest design process. Successfully tested in the real world, with real foresters who had zero robotics experience!
Fast, accurate soil analysis using soil spectroscopy in the browser
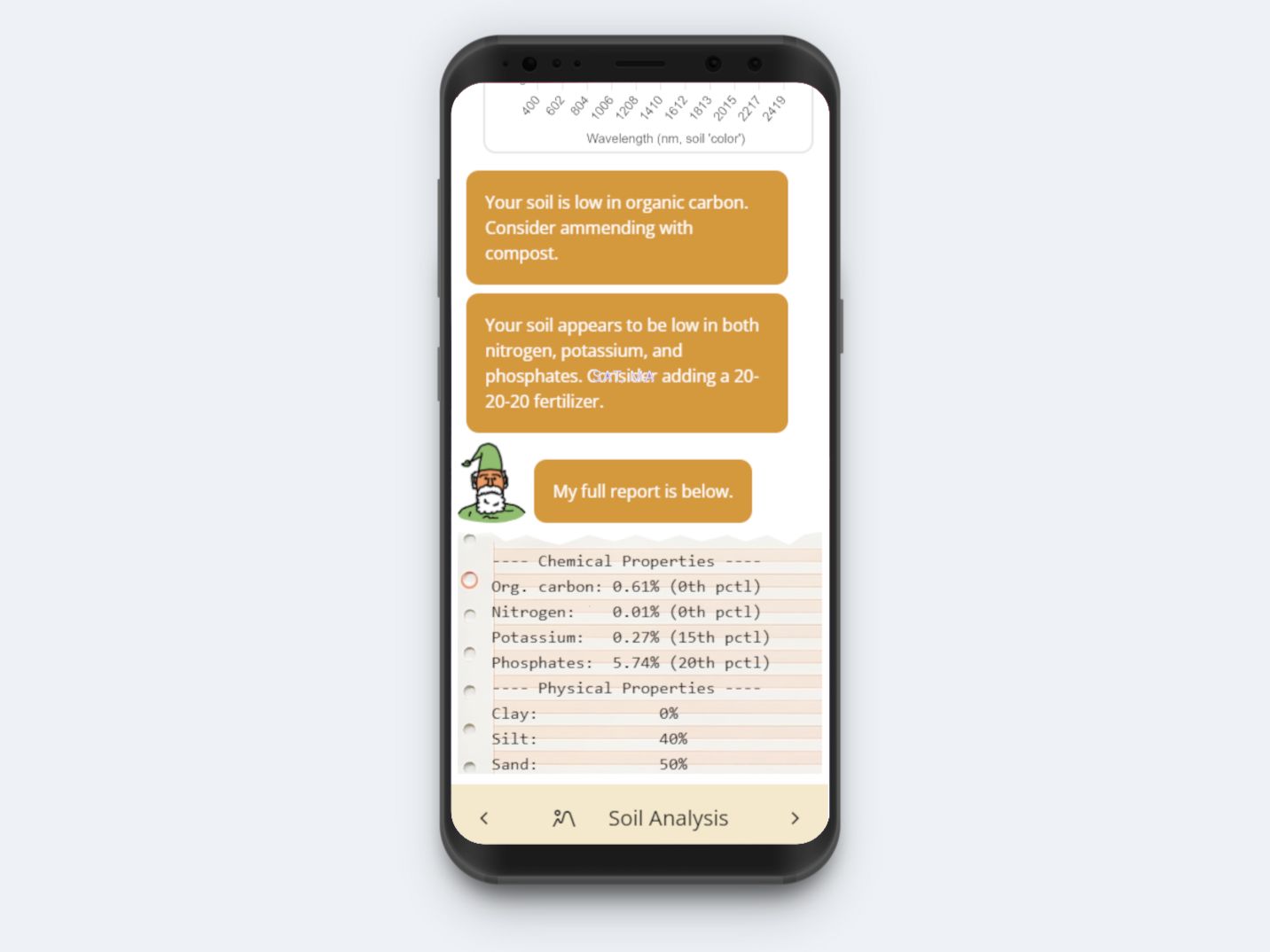
As part of a research fellowship in the USDA's AI Center of Excellence, I developed a SOTA soil analysis tool. It uses a custom-trained ML model to predict physical soil properties from a single VisNIR scan of soil. Tests that take days in a wet lab are finished in less than a second.
Plant ID in the browser using on-device AI
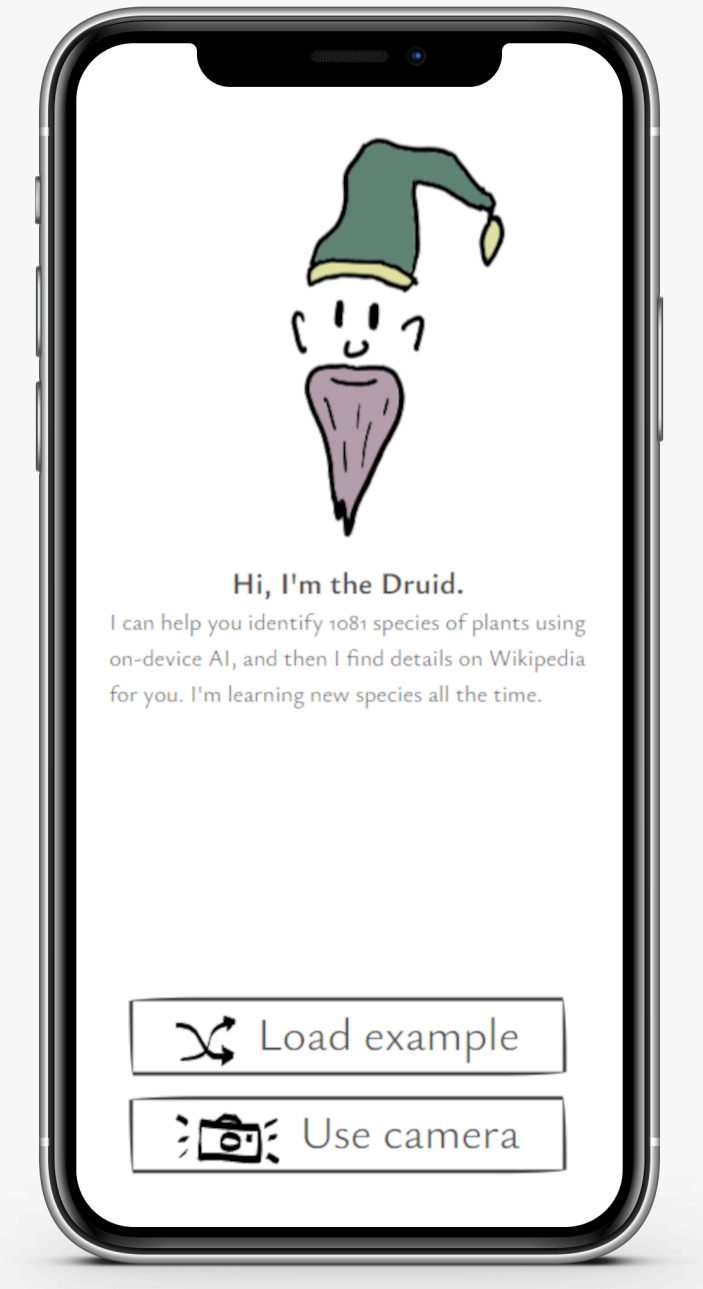
I wanted to push the limits of what on-device AI on a smartphone can do. This is a proof of concept of deploying a ResNet-based plant classifier to the browser using Microsoft's ONNX Runtime library. It's fast, accurate, and private.
Inverse kinematics on a Panda arm
With my friend Leo, I programmed some inverse kinematics on a Panda manipulator using FrankaPy and MoveIt. The transform tree of the Arm was calibrated using a camera mounted to the robot’s wrist, as well as an Aruco marker on the table.
Custom robotics simulator using Unity
[This simulator has changed a lot since this video.] The above is a tool that I’m developing for my reforestation robot project at CMU. The Unity-based simulator has a complete bridge with ROS2, so sensor data from the simulator can be easily displayed in Rviz, for example. I wrote custom scripts to simulate camera sensors, GNSS, and more. The terrain is based of of real-world elevation data pulled from the USGS’s National Map Downloader. I’ve designed this tool so that virtual worlds can be easily created based on any location in the world— all you need are the GPS coordinates.
Forest generation in the browser

I’m fascinated with teaching computers to have “green thumbs”— modeling plant dynamics, eventually so that machines can help us grow plants better than ever! This simple app renders a forest with three.js and gives users a carbon sequestration estimate.
Scene classification using a retro bag-of-words technique
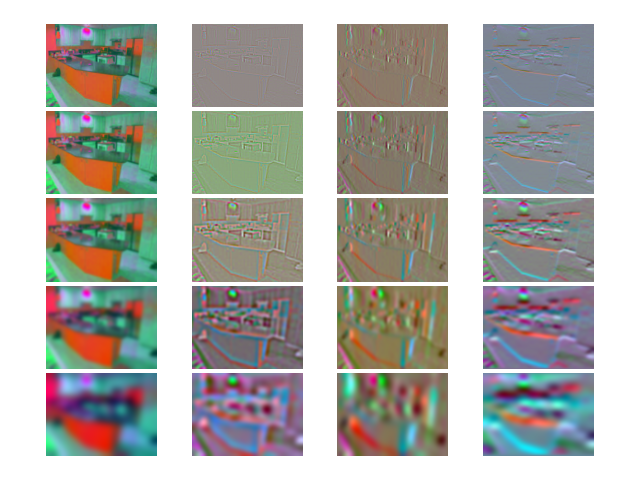
Life existed before CNNs! For my CS class at CMU, I wrote a bag-of-words scene classifier. It uses a series of Gaussian and related filters to convert any image into the frequency domain, then uses the filter responses to construct a histogram. These histograms are clustered, forming a classifier. This technique used to be state-of-the-art. My classifier achieved a whopping 61% accuracy after I tuned the spatial pyramid params.
An underwater ROV control app
A one-day design challenge for VideoRay
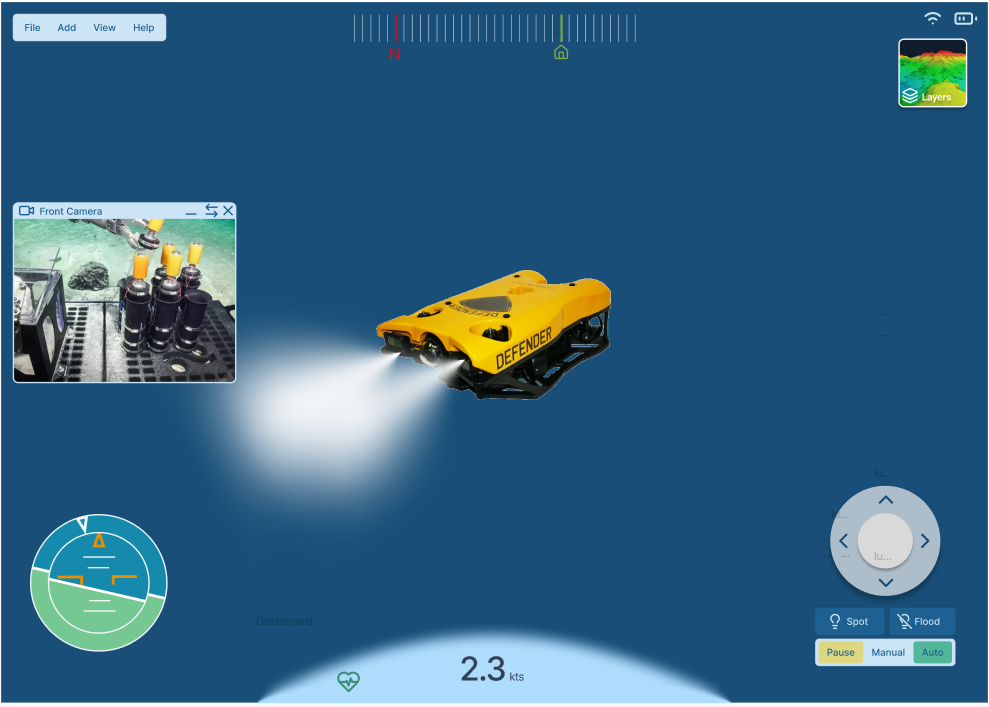
As a one-day design challenge for VideoRay in 2025, I mocked up this control app for an underwater remotely-operated vehicle in Figma. This is a direct screenshot from Figma.
Map-assisted state estimation with semantic segmentation
The idea here is that, in the event that the signal from a GNSS sensor is lost, or another localization sensor fails, we can use real-time perception data and offline map information to retain localization in an autonomous vehicle. Does it work as well as RTK? No! But it’s a great fallback, and it uses computations that the AV stack is performing anyway, so it’s a great safety system that can run in the background. And it reduced error from a simulated noisy GPS by 47%!